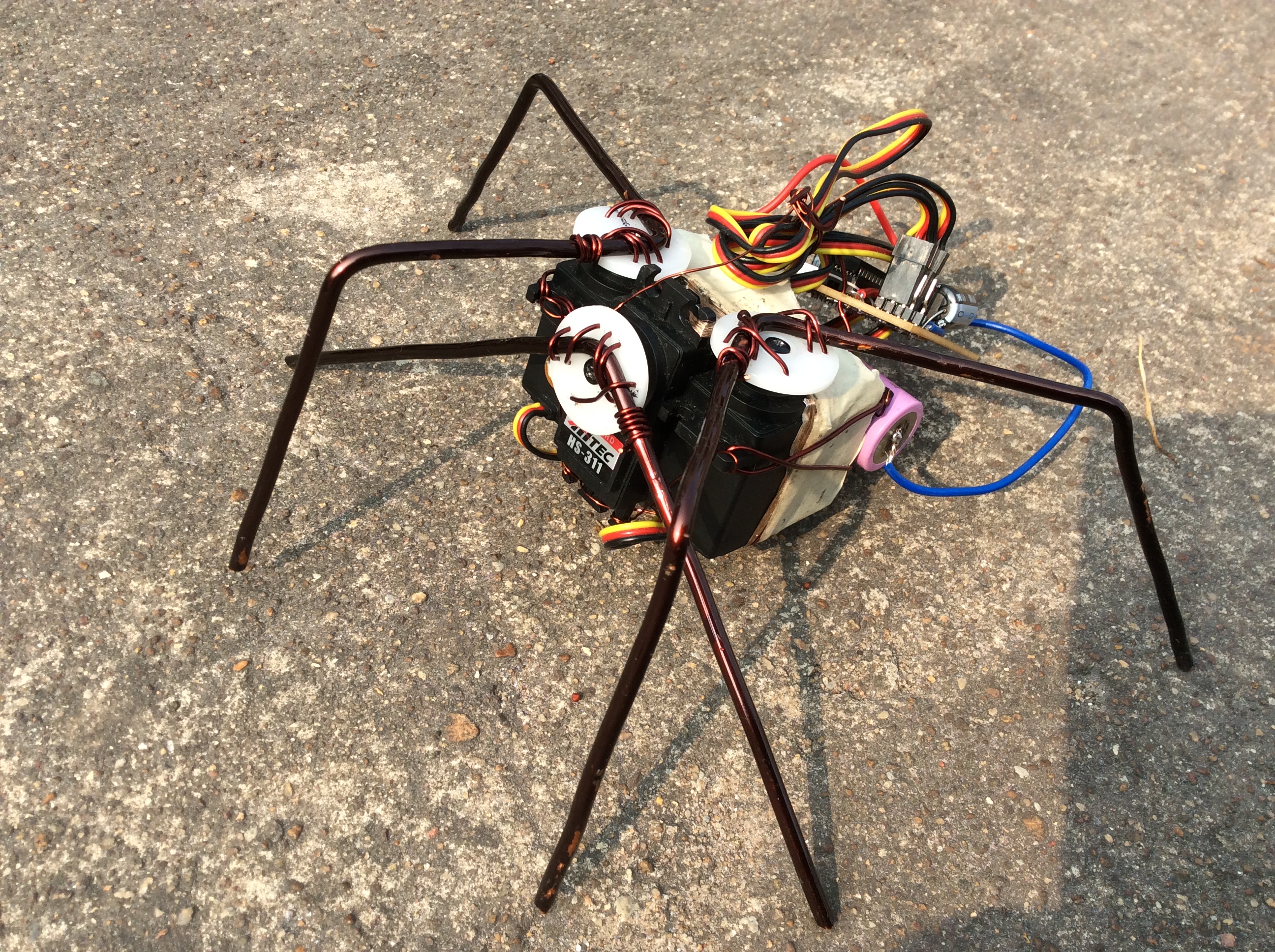
Yes, it somewhat looks a spider with 6 legs (:P) and I believe it scares the real spiders and even bugs LOL.
Update: 17-01-2018
design drawing, yes it’s not perfect and please excuse for this. 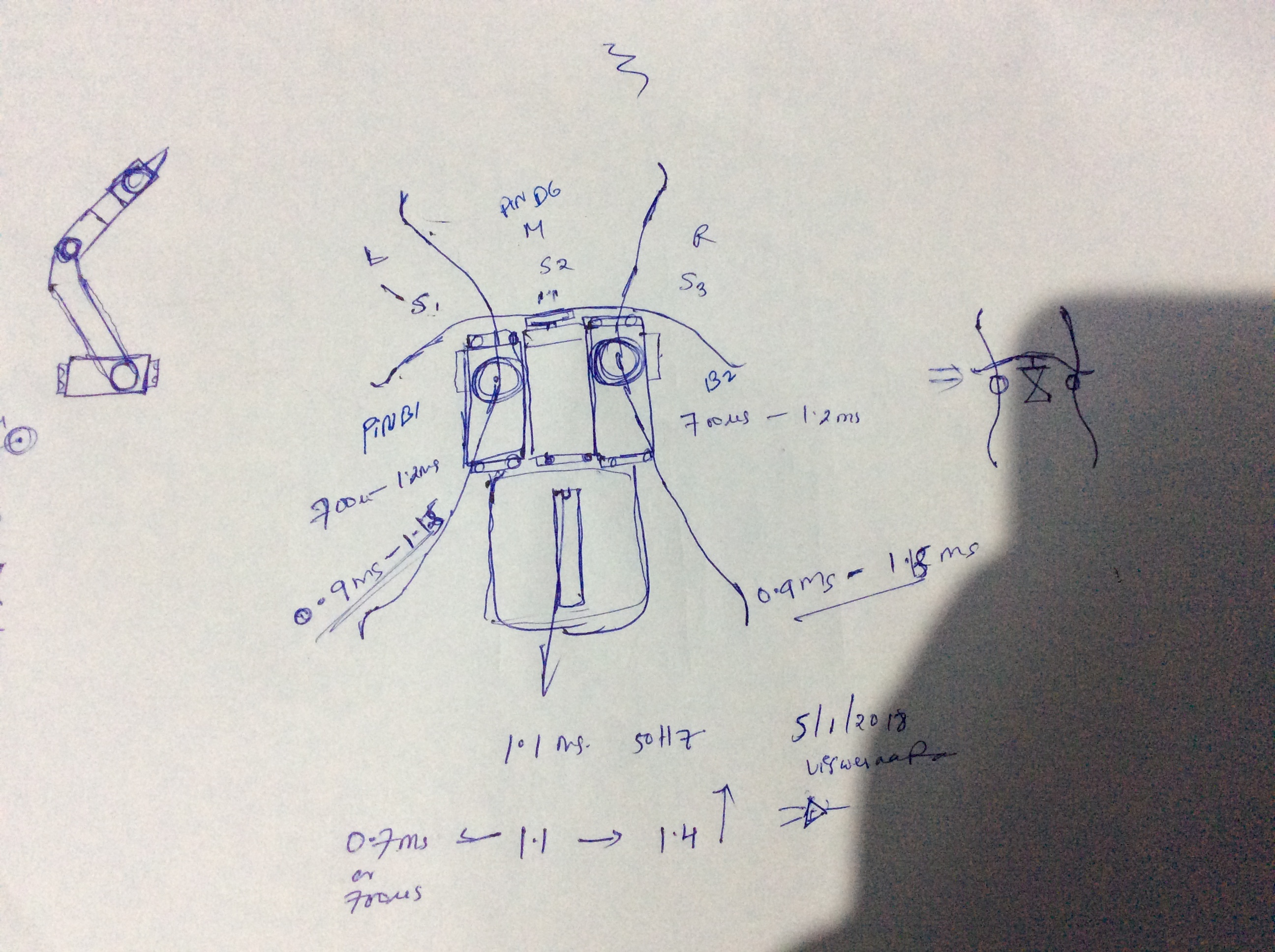
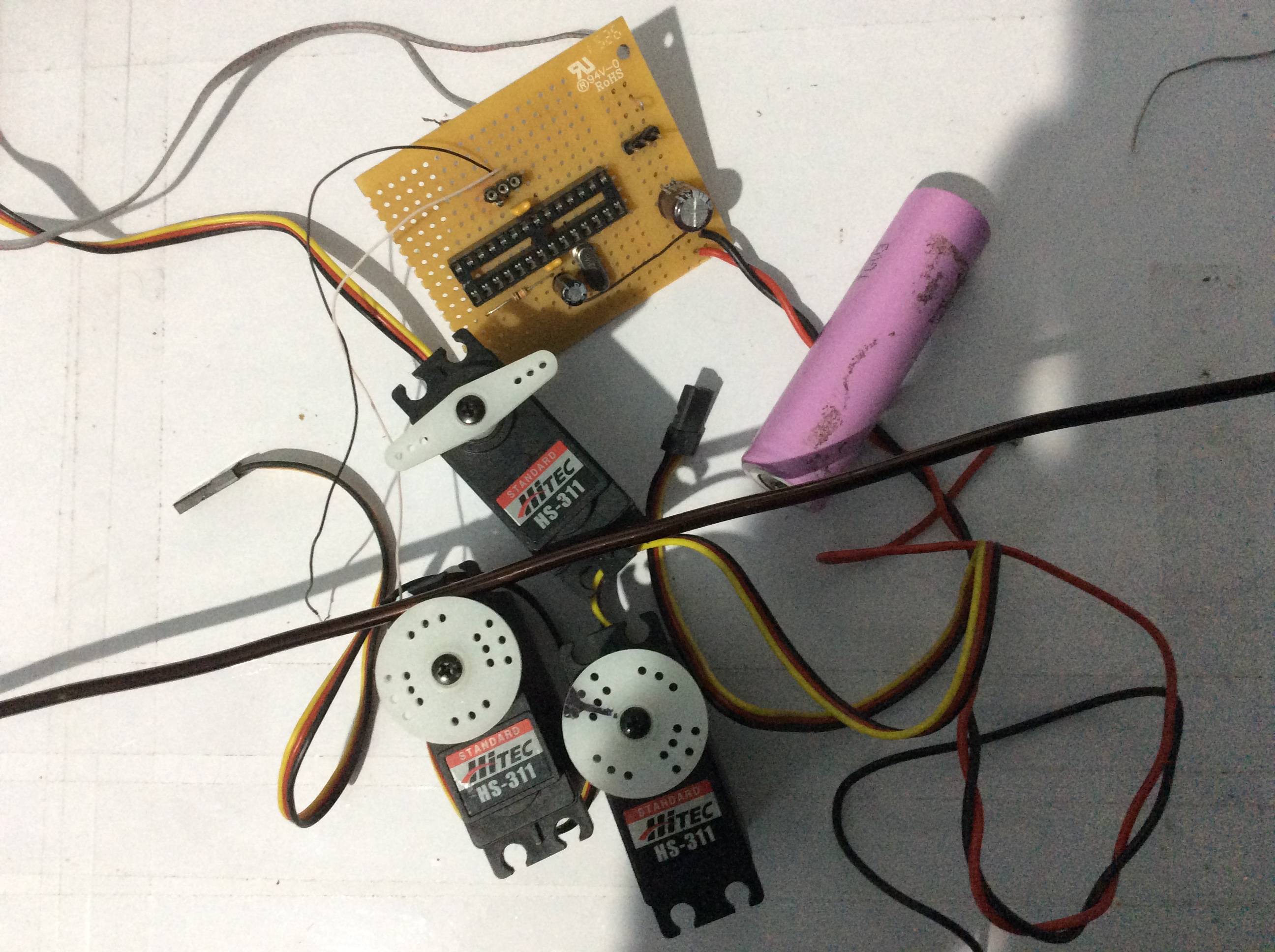
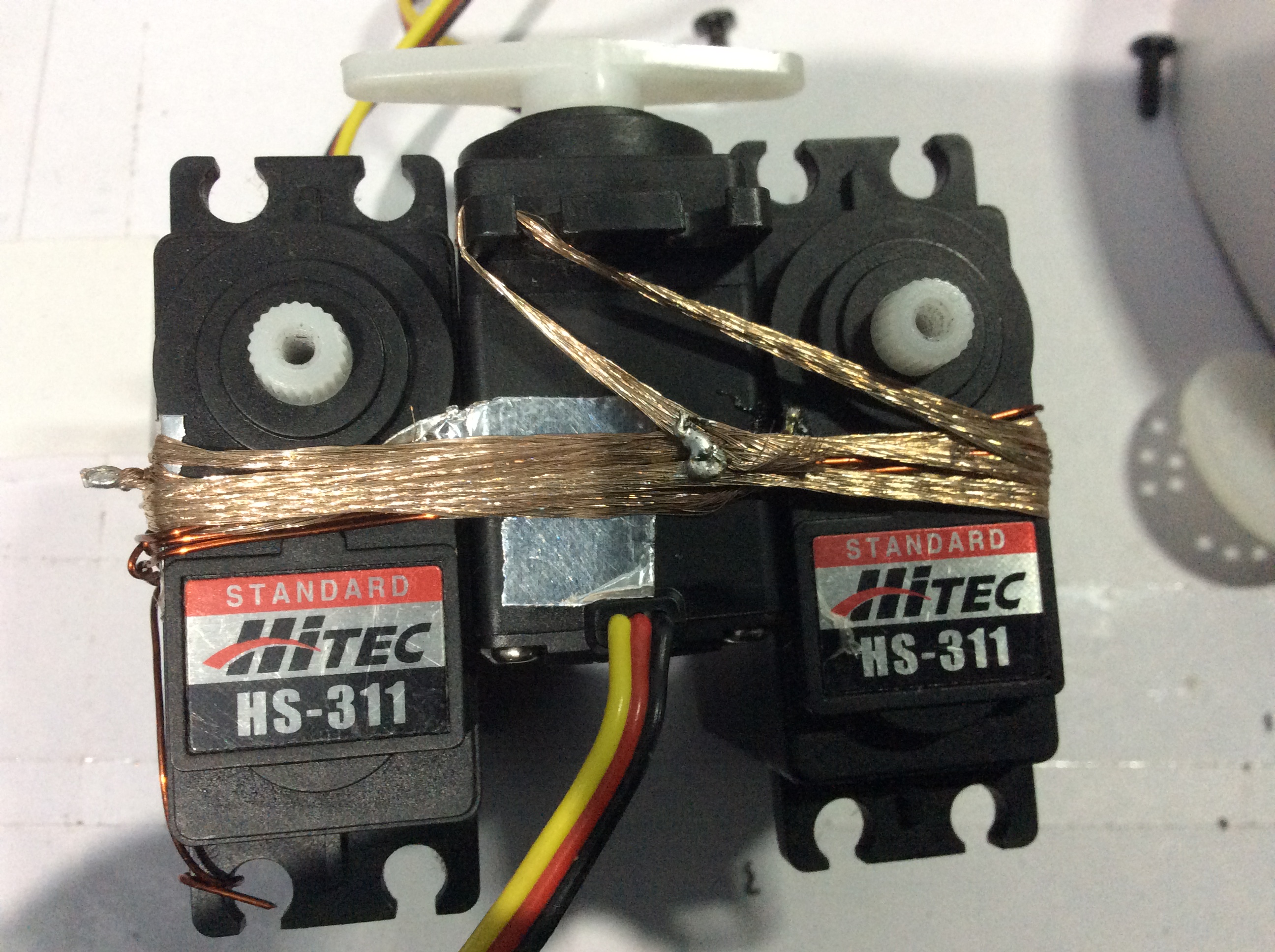
A small hexapod with copper legs and HS-311 actuators/servo’s, I have used 3mm thick copper wire for legs, I had no better option at the of making So I did go with the things I have and a sheild wire, copper wire and paper tape to attach the 3 servo’s
With bending tools I was able to mould legs like and fix them to the motors.
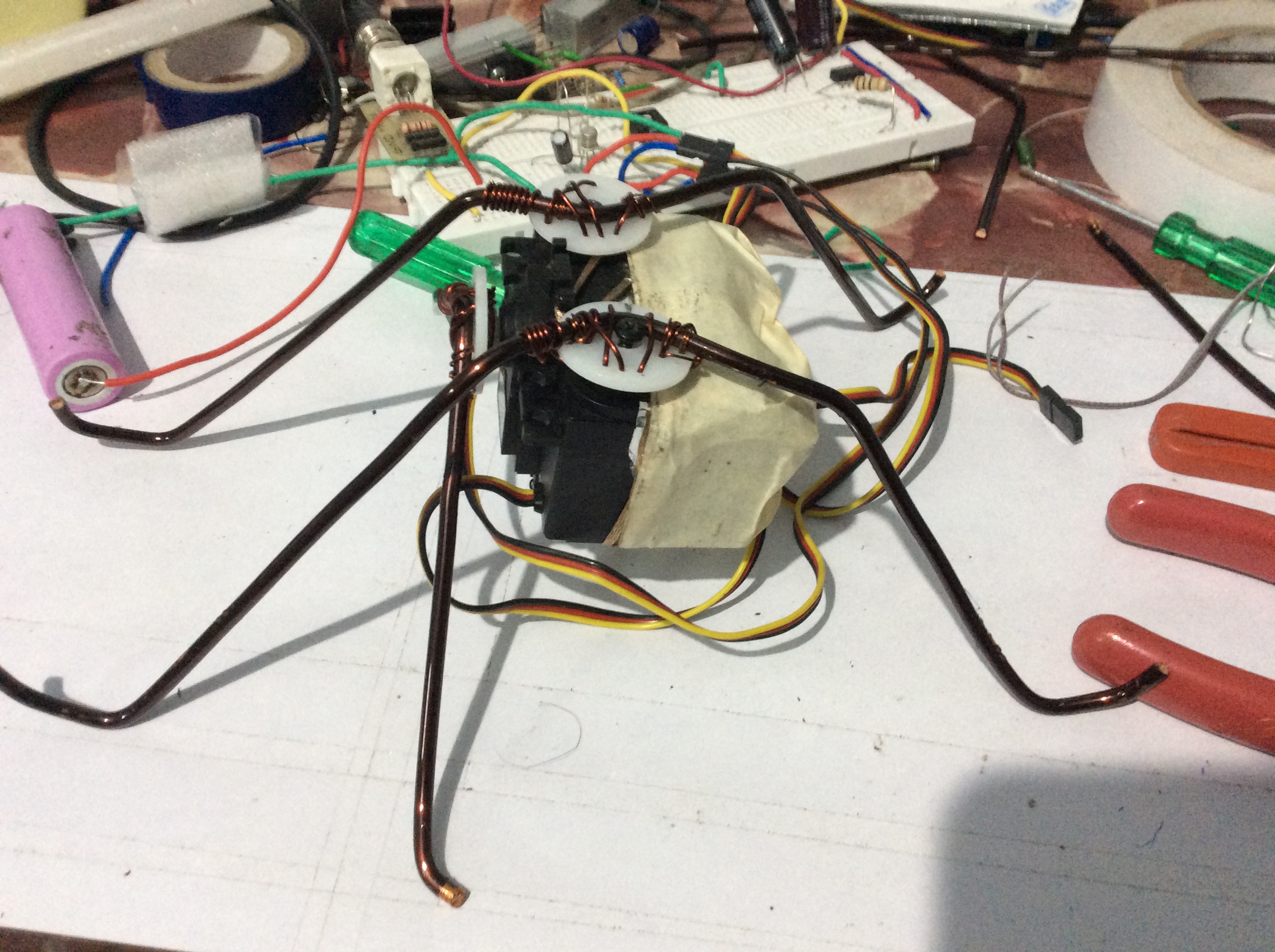
Yes It may not look good. Soon the spider hits the floor and the spider is still in progress.
Spider
- power Source: 3.7V,2600mAh
- CPU: ATmega48 clocked 1.536MHz
- Actuators/servos: HS311
- Sensors: yet to be added
- Programming: AVR C
- Environments: indoor
and many thanks to the Sir protowrxs.
Little update: 17th january of 2018
Modifed the legs style looks perfect and walking is also good.





spider walking. 😛
I will add sensors to it and will update as soon as possible. Thank you all.