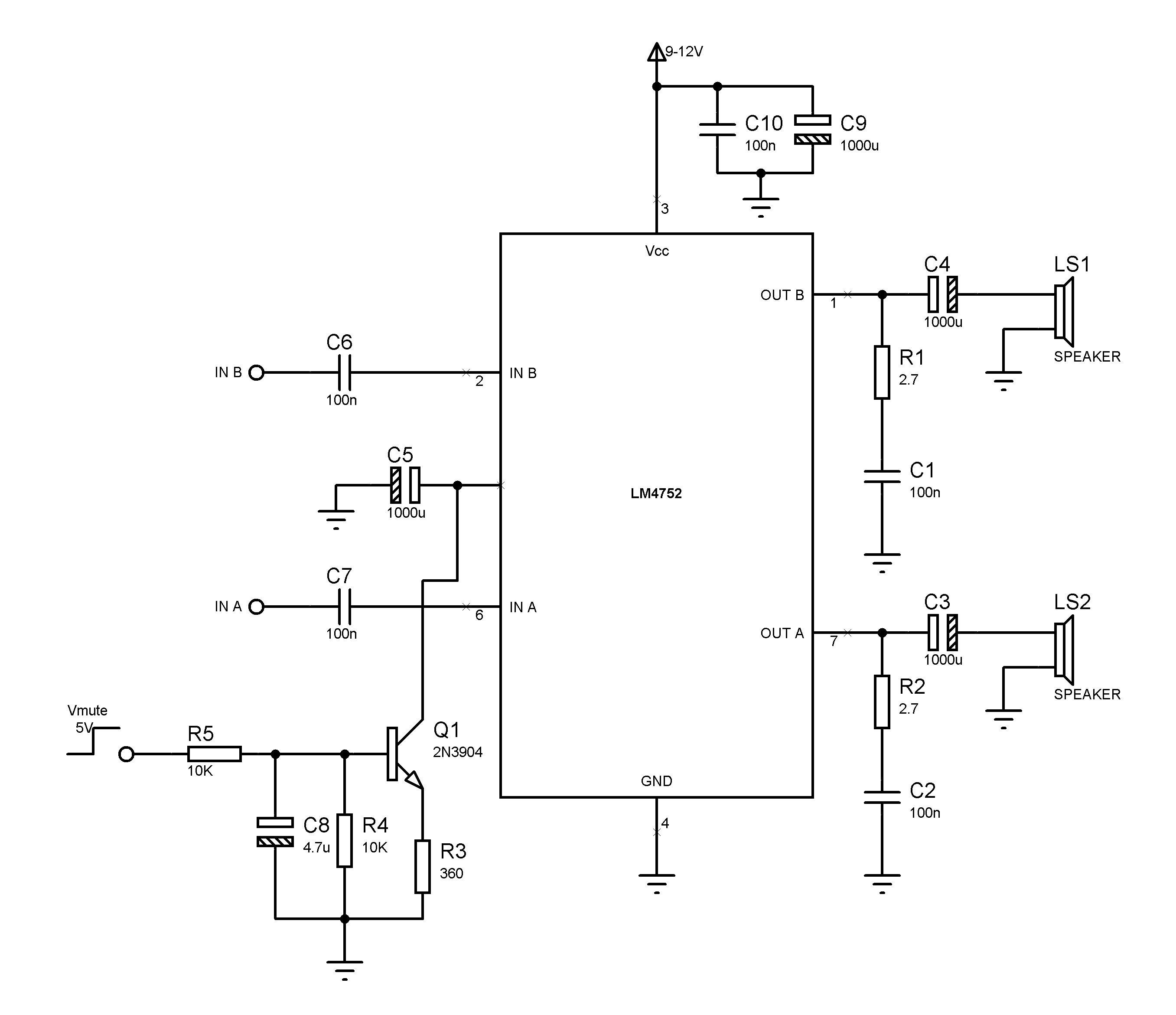
LM4752 is a stereo audio amplifier capable of delivering 11watt per channel of continuous average output power to a 4Ω load, or 7W per channel into 8Ω, using a single supply at 10% THD+N. A simple mute function can be implemented with the addition of a few external components.
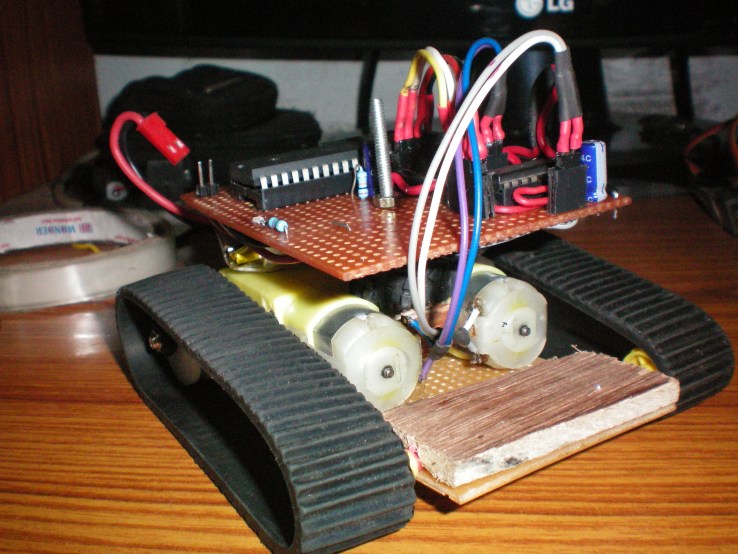
Mini tank robot was my one of oldest project. I built it for fun, no use only for fun. I did used ADXL335 accelerometer for inclination detection , AVR microncontroller (ATmega164P) for processing and controlling and L293D motor driver Chip and BO series motor.
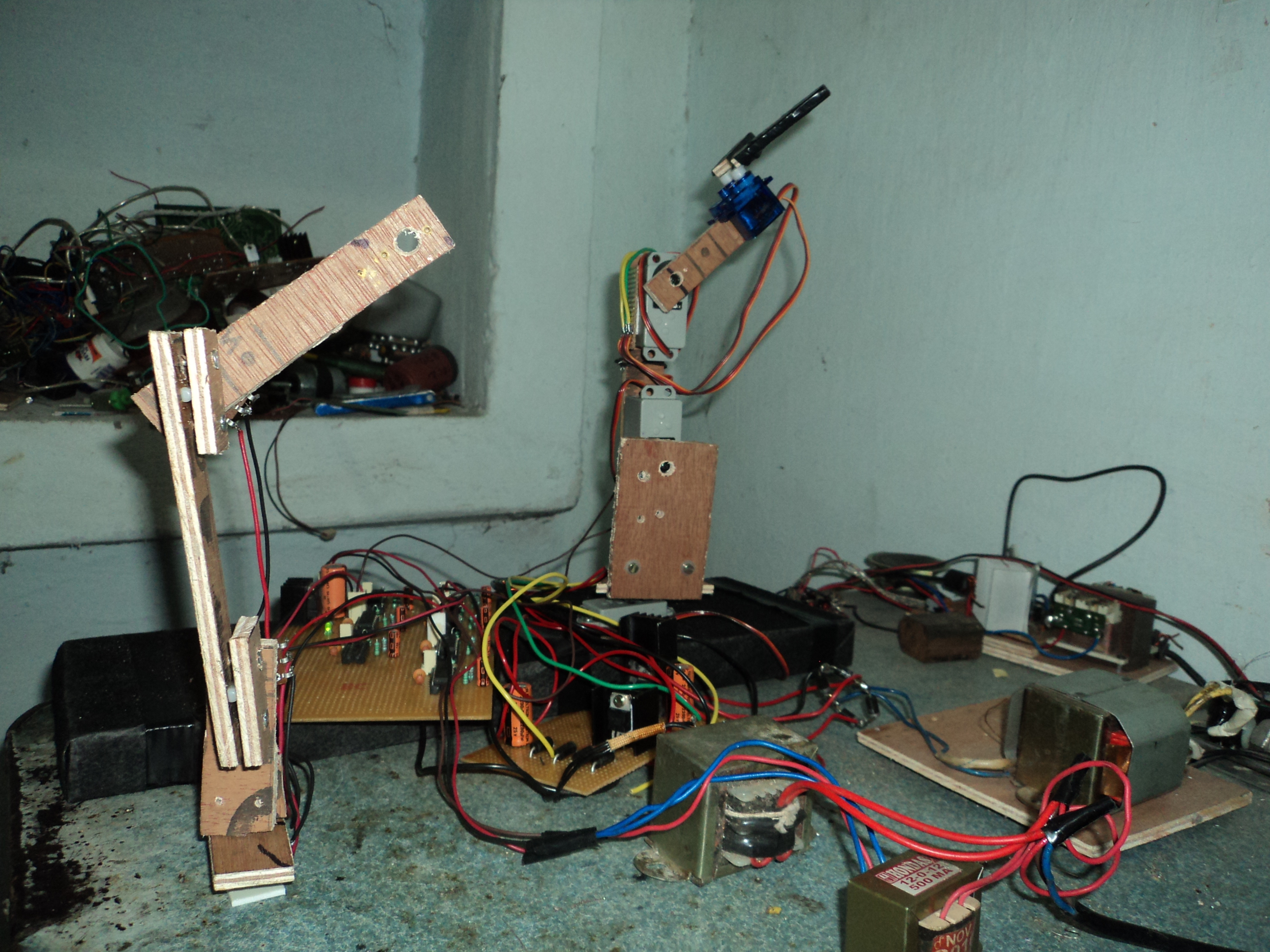
master-slave robot arm or teleoperator, this is one of my oldest project which I was built in 2012, For this simple application I did used NE556 IC to control Servo motors, It is a dual timer chip and yep brother of very famous chip called NE555, NE556 dual timer chip, one timer configured in astable mode and output of it is connected to another timer which is configured in monostable and the pulse width is controlled by simple potentiometer or variable resistor which is connected in monostable circuit(RC network), Monostable output is a control signal further conneted to control terminal of analogue servo motor.
Master_arm (potentiometers as position sensors) wooden arm
master arm(potentiometers as position sensors)
Slave_arm with cheap servos
slave_arm with servo’s
Control circuit using NE556 dual timer chip and some other passive components